cs231n作业2笔记
文章目录
简介
Assignment1中我们分别采用 kNN、线性分类器、SVM、Softmax分类以及简单两层神经网络对CIFAR-10数据集进行了分类。
来到Assignment2中,需要自己搭建卷积神经网络(CNN)来进行图像分类。
Assignment2主要分为5个部分:
- Fully-connected Nerual Network
这部分为作业1中两层神经网络的延续,需要将各个隐藏层的forward以及backward过程模块化,以便搭建任意层数的神经网络。
- Batch Normalization
为了使深度神经网络的训练更快,一种策略是寻找更好的优化方法;另一种思路便是改变网络的架构使其训练更快。我们知道,机器学习方法对于白化(特征之间无相关性,零均值,单位方差)的输入数据有着更好的效果。
对数据的预处理(去均值、归一化、PCA以及白化)只能保证第一层的输入满足条件,但随着网络的逐步深入,深层网络的激活输入就不再满足条件了。更糟的是,随着训练加深,每层的特征分布还会随着权重的更新而偏移。
loffe 2015提出的Batch Normalization便是为了解决这个问题的。具体可以参考论文。
- Dropout
Dropout 是缓解过拟合的一种方法。会按比例随机的丢掉一部分激活值,达到缓解过拟合的目的。
- Convolutional Networks
这部分需要完成CNN的各个组件,然后组合在一起,搭建一个完整的CNN网络。
- PyTorch/TensofFlow on CIFAR-10
主要是这两个框架的练习。
我的代码实现whu-pzhang/cs231n.
Fully-connected Nerual Network
这部分需要对每层实现一个 forward 和 backward 函数:forward 函数接收为输入、权重和其他参数,返回输出以及一个 cache 对象,包含反向传播计算梯度时用到的数据。
def layer_forward(x, w):
""" Receive inputs x and weights w """
# Do some computations ...
z = # ... some intermediate value
# Do some more computations ...
out = # the output
cache = (x, w, z, out) # Values we need to compute gradients
return out, cachebackward 函数则接收upstream传过来的梯度和 forward 返回的 cache 对象,
计算返回该层相对于输入和权重的梯度值。
def layer_backward(dout, cache):
"""
Receive dout (derivative of loss with respect to outputs) and cache,
and compute derivative with respect to inputs.
"""
# Unpack cache values
x, w, z, out = cache
# Use values in cache to compute derivatives
dx = # Derivative of loss with respect to x
dw = # Derivative of loss with respect to w
return dx, dwaffine layer
全连接层的forward就是简单的矩阵乘法。需要先将每个实例展平为向量,然后和权重做矩阵乘法即可,最后别忘了偏置项。
x_reshaped = x.reshape(x.shape[0], -1)
out = x_reshaped.dot(w) + bbackward时,根据链式法计算即可,注意各个量的shape即可。
dx = dout.dot(w.T).reshape(*x.shape)
dw = x.reshape(x.shape[0], -1).T.dot(dout)
db = np.sum(dout, axis=0)ReLU activation
ReLU 激活只是应用一个mask,计算相当简单,直接用 np.maximum() 函数即可。
backward时,注意只有大于零的项有梯度值。
组合层
将affine层和ReLU组合起来即可
loss layers
在作业1中实现的Softmax和SVM损失函数可以直接拿过来用,不再赘述。
搭建多层神经网络
现在直接将前面实现的层组合起来便可以实现全连接层神经网络。
搭建完成后,利用提供的Solver类,便可以实现神经网络的训练和验证。
优化方法
根据讲义里的各种优化方法,直接实现即可,没啥难度。主要是理解每个优化方法的思想。
依次是 SGD+Momentum,RMSProp 和 Adam。
Batch Normalization
Batch Normalization是为了克服层数较多的神经网络在训练时的 internal covariate shift 现象,减弱梯度饱和。此外,还可以加快训练速度,学习率也可以设置的较大。
forward
设BN层的小批量输入为 $\boldsymbol{X} \in \mathbb{R}^{ N \times D}$。 在forward过程中,首先计算每个特征的均值和方差:
\[ \begin{align} \boldsymbol{\mu} &= \frac{1}{N} \sum_{k=1}^N \boldsymbol{x}_k \\ \boldsymbol{\sigma}^2 & = \frac{1}{N} \sum_{k=1}^N { (\boldsymbol{x}_k - \boldsymbol{\mu})^2 } \end{align} \]
接着就可以对输入进行归一化:
\[ \boldsymbol{\hat{x}}_i = \frac{ \boldsymbol{x}_i - \boldsymbol{\mu}} { \sqrt{\boldsymbol{\sigma}^2 + \epsilon} } \]
再进行平移和缩放:
\[ \boldsymbol{y}_i = \gamma \, \boldsymbol{\hat x}_i + \beta \]
其中,$\gamma, \beta \in \mathbb{R}^{1 \times D}$。整个forward过程可记为:
\[ \boldsymbol{\hat{X}} = \frac{\boldsymbol{X} - \boldsymbol{\mu}} {\sqrt{ \boldsymbol{\sigma}^2 + \epsilon}} \\ \boldsymbol{Y} = \gamma \odot \boldsymbol{\hat{X}} + \beta \]
至此,正向传播就完成了。
为了方便计算梯度的反向传播,根据计算图可将forward过程分解为如下9步:
mu = 1.0 / N * np.sum(x, axis=0, keepdims=True) # (1)
xsubmu = x - mu # (2)
xsubmusqr = xsubmu**2 # (3)
var = 1.0 / N * np.sum(xsubmusqr, axis=0, keepdims=True) # (4)
sqrtvar = np.sqrt(var + eps) # (5)
invsqrtvar = 1.0 / sqrtvar # (6)
x_norm = xsubmu * invsqrtvar # (7)
gammax = gamma * x_norm # (8)
out = gammax + beta # (9)backward
backward 过程按照上面9步倒序进行即可:
dgammax = dout # (9)
dbeta = np.sum(dout, axis=0, keepdims=True) # (9)
dgamma = np.sum(dgammax * x_norm, axis=0, keepdims=True) # (8)
dx_norm = dgammax * gamma # (8)
dxsubmu = dx_norm * invsqrtvar # (7)
dinvsqrtvar = np.sum(dx_norm * xsubmu, axis=0, keepdims=True) # (7)
dsqrtvar = dinvsqrtvar * (-1.0) * (sqrtvar)**(-2) # (6)
dvar = dsqrtvar * (0.5 * (var + eps)**(-0.5)) # (5)
dxsubmusqr = dvar * (1.0 / N * np.ones((N, D))) # (4)
dxsubmu += dxsubmusqr * (2 * xsubmu) # (3)
dx = dxsubmu # (2)
dmu = -1.0 * np.sum(dxsubmu, axis=0, keepdims=True) # (2)
dx += dmu * (1.0 / N * np.ones((N, D))) # (1)Alternative backward implement
BatchNorm backward前面的实现是按照计算图一步步来的,实际上可以直接推导出BatchNorm的梯度计算公式,这样能够简化计算。
设 $L$ 为训练损失,我们已知从upstream传来的 $\frac{\partial L}{\partial \boldsymbol{Y}} \in \mathbb{R}^{N \times D}$, 反向传播时,我们需要计算:
- $\frac{\partial L}{\partial \beta} \in \mathbb{R}^{1 \times D}$
- $\frac{\partial L}{\partial \gamma} \in \mathbb{R}^{1 \times D}$
- $\frac{\partial L}{\partial \boldsymbol{X}} \in \mathbb{R}^{N \times D}$。
$\frac{\partial L}{\partial \beta}$ 和 $\frac{\partial L}{\partial \gamma}$ 的计算很直观:
\[ \begin{align} \frac{\partial L}{\partial \gamma} & = \sum_{i}^N { \frac{\partial L} {\partial \boldsymbol{y}_i} \odot \boldsymbol{\hat{x}_i}} \\ \frac{\partial L}{\partial \beta} & = \sum_i^N {\frac{\partial L} {\partial \boldsymbol{y}_i}} \end{align} \]
而 $\frac{\partial L}{\partial \boldsymbol{x}_i}$ 的计算则比较复杂。 由于 $\boldsymbol{\mu}, \boldsymbol{\sigma}$ 都是 $\boldsymbol{x}_i$ 的函数,根据链式法则:
\[ \frac{\partial L}{\partial \boldsymbol{x}_i} = \frac{\partial L}{\partial \boldsymbol{\hat{x}}_i} \frac{\partial \boldsymbol{\hat{x}}_i}{\partial \boldsymbol{x}_i} + \frac{\partial L}{\partial \boldsymbol{\sigma}^2} \frac{\partial \boldsymbol{\sigma}^2}{\partial \boldsymbol{x}_i} + \frac{\partial L}{\partial \boldsymbol{\mu}} \frac{\partial \boldsymbol{\mu}}{\partial \boldsymbol{x}_i} \]
我们可以依次计算这三项。第一项比较简单:
\[ \begin{align} \frac{\partial L}{\partial \boldsymbol{\hat{x}}_i} & = \gamma \odot \frac{\partial L}{\partial \boldsymbol{y}_i} \\ \frac{\partial \boldsymbol{\hat{x}}_i}{\partial \boldsymbol{x}_i} & = (\boldsymbol{\sigma}^2 + \epsilon) ^ {-1/2} \\ & \Downarrow \\ \frac{\partial L}{\partial \boldsymbol{\hat{x}}_i} \frac{\partial \boldsymbol{\hat{x}}_i}{\partial \boldsymbol{x}_i} & = \gamma \odot \frac{\partial L}{\partial \boldsymbol{y}_i} \, (\boldsymbol{\sigma}^2 + \epsilon) ^ {-1/2} \end{align} \]
接下来计算第二项:
\[ \frac{\partial L}{\partial \boldsymbol{\sigma}^2} = \sum_i^N { \frac{\partial L}{\partial \boldsymbol{\hat{x}}_i} \, \frac{\partial \boldsymbol{\hat{x}}_i}{\partial \boldsymbol{\sigma}^2} } = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-3/2}}{2} \, \sum_{i}^{N} {\frac{\partial L}{\partial \boldsymbol{y}_i} \odot (\boldsymbol{x}_i - \boldsymbol{\mu}) } \]
计算相对于 $\boldsymbol{\sigma}$ 的梯度时,需要沿着批量中所有的实例求和,对 $\boldsymbol{\mu}$ 求导(第三项)时也是一样:
\[ \begin{align} \frac{\partial L}{\partial \boldsymbol{\mu}} & = \sum_i^N { \frac{\partial L}{\partial \boldsymbol{\hat{x}}_i} \frac{\partial \boldsymbol{\hat{x}}_i}{\partial \boldsymbol{\mu}} } + \frac{\partial L}{\partial \boldsymbol{\sigma}^2} \frac{\partial \boldsymbol{\sigma}^2}{\partial \boldsymbol{\mu}} \\ & = -\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2} \, \sum_{i}^{N} {\frac{\partial L}{\partial \boldsymbol{y}_i}} + \frac{\partial L}{\partial \boldsymbol{\sigma}^2} \cdot (-\frac{2}{N}) \cdot \sum_i^N (\boldsymbol{x}_i - \boldsymbol{\mu}) \\ & = -\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2} \, \sum_{i}^{N} {\frac{\partial L}{\partial \boldsymbol{y}_i}} \end{align} \]
接下来分别求得 $\frac{\partial \boldsymbol{\sigma}^2}{\partial \boldsymbol{x}_i}$ 和 $\frac{\partial \boldsymbol{\mu}}{\partial \boldsymbol{x}_i}$:
\[ \frac{\partial \boldsymbol{\mu}} {\partial \boldsymbol{x}_i} = \frac{1}{N} \\ \frac{\partial \boldsymbol{\sigma}^2} {\partial \boldsymbol{x}_i} = \frac{2}{N} \sum_i^N (\boldsymbol{x}_i - \boldsymbol{\mu}) \]
现在可得第二项为:
\[ \begin{align} \frac{\partial L}{\partial \boldsymbol{\sigma}^2} \frac{\partial \boldsymbol{\sigma}^2}{\partial \boldsymbol{x}_i} & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-3/2}}{2} \, \sum_{i}^{N} {\frac{\partial L}{\partial \boldsymbol{y}_i} \odot (\boldsymbol{x}_i - \boldsymbol{\mu}) } \cdot \frac{2}{N} (\boldsymbol{x}_j - \boldsymbol{\mu}) \\ & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \left( \sum_i^N {\frac{\partial L}{\partial \boldsymbol{y}_i} \odot (\boldsymbol{x}_i - \boldsymbol{\mu}) } \right) \frac{ \boldsymbol{x}_j - \boldsymbol{\mu}} {\boldsymbol{\sigma}^2 + \epsilon} \\ & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \left( \sum_i^N {\frac{\partial L}{\partial \boldsymbol{y}_i} \odot \boldsymbol{\hat{x}_i}\sqrt{\boldsymbol{\sigma}^2 + \epsilon} } \right) \frac{ \boldsymbol{x}_j - \boldsymbol{\mu}} {\boldsymbol{\sigma}^2 + \epsilon} \\ & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \left( \sum_i^N {\frac{\partial L}{\partial \boldsymbol{y}_i} \odot \boldsymbol{\hat{x}_i} } \right) \frac{ \boldsymbol{x}_j - \boldsymbol{\mu}} { \sqrt{\boldsymbol{\sigma}^2 + \epsilon} } \\ & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \cdot \frac{\partial L} {\partial \gamma} \cdot \boldsymbol{\hat{x}_j} \end{align} \]
第三项为:
\[ \begin{align} \frac{\partial L}{\partial \boldsymbol{\mu}} \frac{\partial \boldsymbol{\mu}}{\partial \boldsymbol{x}_i} & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \cdot \sum_i^N { \frac{\partial L} {\partial \boldsymbol{y}_i}} \\ & = -\frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \cdot \frac{\partial L} {\partial \beta} \end{align} \]
现在将这三项加在一块即可得:
\[ \frac{\partial L}{\partial \boldsymbol{x}_i} = \frac{\gamma (\boldsymbol{\sigma}^2 + \epsilon)^{-1/2}} {N} \left( N \frac{\partial L} {\partial \boldsymbol{y}_i} - \frac{\partial L} {\partial \gamma} \cdot \boldsymbol{\hat{x}_j} - \frac{\partial L} {\partial \beta} \right) \]
最终我们得到了$\frac{\partial L}{\partial \boldsymbol{x}_i}$的数学表达式,相比前面基于计算图的实现更为简便。实现代码如下:
xsubmu, var, sqrtvar, invsqrtvar, x_norm, gamma, eps = cache
N, D = xsubmu.shape
dbeta = np.sum(dout, axis=0, keepdims=True)
dgamma = np.sum(x_norm * dout, axis=0, keepdims=True)
dx = (1. / N) * gamma * invsqrtvar * (N * dout - dgamma * x_norm - dbeta)这个实现相比基于计算图的实现,会快上2~4倍。
Layer Normalization
BatchNorm对batch size的依赖使其在复杂网络的训练中受限。因此发展出了多种batchnorm的变种。 Layer Normalization 是沿着特征轴进行的 Batch Normalization。其实现只需要对batchnorm进行些许的改动即可。
Dropout
Dropout是在forward过程中通过随机将一部分特征设为零来实现的一种正则化方法。实现起来也很简单,不过为了使测试时的代码不发生改变,通常使用的是 Inverted dropout,在训练时进行放大。
mask = (np.random.rand(*x.shape) < p) / p
out = x * maskConvolutional Networks
卷积神经网络(CNN)其实和常规的神经网络很像,由包含可学习的权重和偏置的神经元组成。 每个神经元参数与输入做点积得到新的输出。CNN中通常包括卷积层(Convolutional layer)、池化层(Pooling layer)和全联接层(Fully-connected layer)。
卷积层是CNN的核心。在处理图像这类高维的输入时,不可能将当前神经元与输入的全部神经元连接起来。在卷积层中,只将当前神经元与输入数据的局部区域进行连接。即神经元的局部感受野(Local receptive field),也即是卷积核的大小,这是一个Hyperparameter。此外,主要注意的是,这种空间局部连接在深度轴方向总是与输入的深度相等的。
卷积层的输出大小由三个Hyperparameter控制:
输出深度(depth):对应着卷积层中卷积核的个数。每个卷积核在训练过程中会从输入中提取出不同的特征。
滑动步幅(stride):控制着卷积核每次移动的像素数。当stride为2时,卷积核每次移动两个像素。
zero-padding:输入数据边缘需要填充的大小。可以控制输出的空间大小。
输出的空间大小是着三个参数的函数。设输入数据大小为 $W$,卷积层神经元感受野大小为$F$,卷积核移动步幅为$S$,zero-padding大小为$P$,那么该卷积层输出的大小为
\[ (W - F + 2P) / S + 1 \]
卷积层的另外一个重要特点是权值共享(weight sharing),也就是说对同一层的每个神经元的权重都是同一个,这样可使网络的参数大大减少。
作业2中的卷积采用的是原始实现,通过两层循环即可,这里不多讲,直接贴我的代码实现:
forward:
stride = conv_param['stride']
pad = conv_param['pad']
N, C, H, W = x.shape
F, C, HH, WW = w.shape
Hout = (H + 2 * pad - HH) // stride + 1
Wout = (W + 2 * pad - WW) // stride + 1
out = np.zeros((N, F, Hout, Wout), dtype=x.dtype)
padx = np.pad(x, ((0, 0), (0, 0), (pad, pad), (pad, pad)), 'constant')
for i in range(Hout):
for j in range(Wout):
xblock = padx[:, :, i * stride:i *
stride + HH, j * stride:j * stride + WW]
for k in range(F):
out[:, k, i, j] = np.sum(xblock * w[k], axis=(1, 2, 3))
out += b[np.newaxis, :, np.newaxis, np.newaxis]backward:
dw = np.zeros_like(w)
dpadx = np.zeros_like(padx)
db = np.sum(dout, axis=(0, 2, 3))
for i in range(Hout):
for j in range(Wout):
xblock = padx[:, :, i * stride:i *
stride + HH, j * stride:j * stride + WW]
for k in range(F):
dw[k, :, :, :] += np.sum(xblock * dout[:, k, i, j]
[:, None, None, None], axis=0)
for n in range(N):
dpadx[n, :, i * stride:i * stride + HH, j * stride:j * stride +
WW] += np.sum(dout[n, :, i, j][:, None, None, None] * w, axis=0)im2col
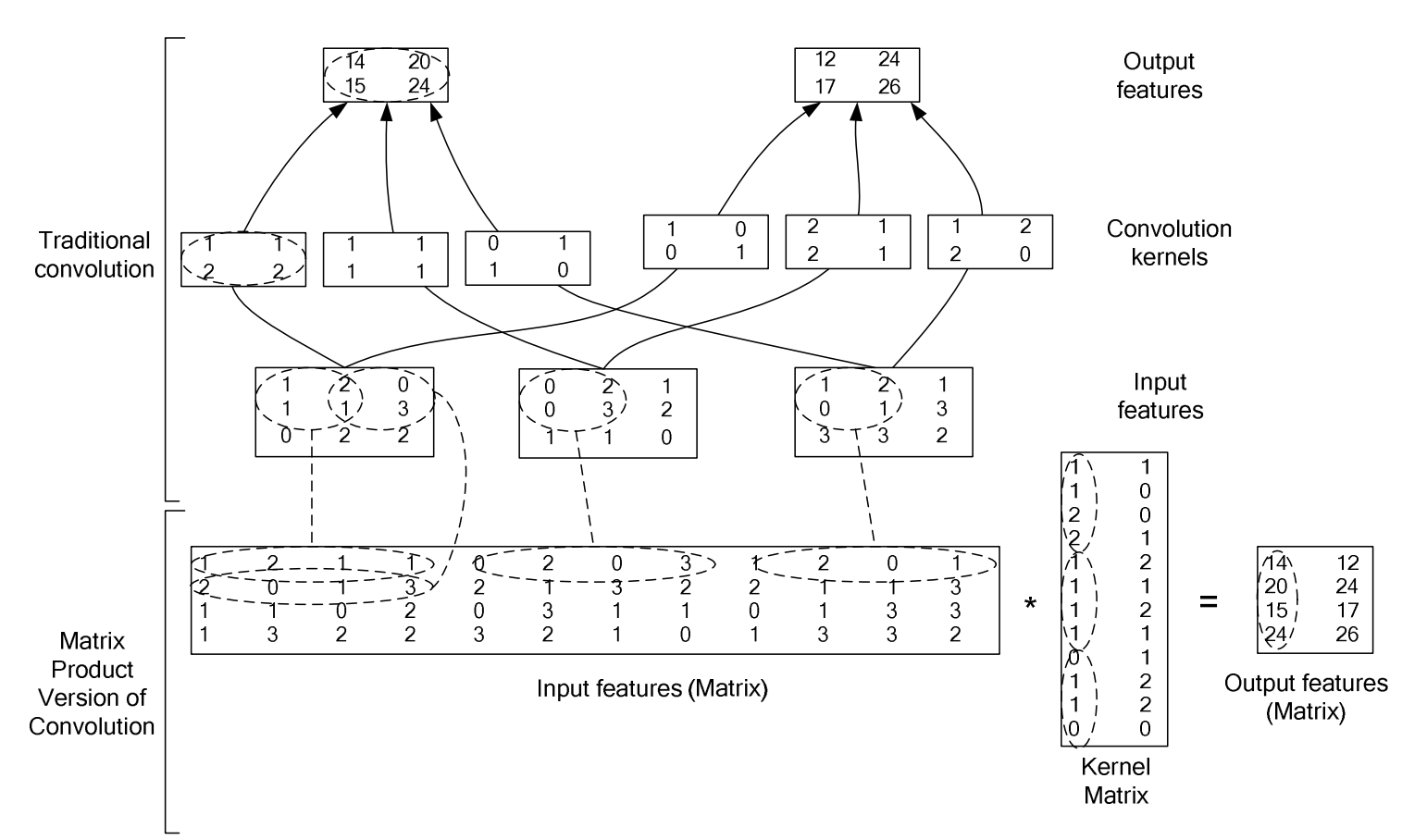
这里来推导CNN基于矩阵乘法的高效实现。
先来看单通道的情况。为了简单起见, 设输入$X$ 为 $3 \times 3$,卷积核$W$为 $2 \times 2$,步幅为1,没有pading,那么输出$Y$的大小为 $(3 - 2)/1 + 1 = 2$。在实际计算中,为了提高效率,通常会把二维卷积转为矩阵乘法,这样就避免了循环。具体就是先将输入中卷积核对应的每个局部感受野展平为向量,然后叠成一个大的矩阵,矩阵的大小计算根据输出大小和卷积核大小确定:本例中,输出为 $2 \times 2$,展平即为 $4 \times 1$,卷积核大小为 $2 \times 2$,展平为 $4 \times 1$,因此输入 $X$ 会变成 $4 \times 4$ 的矩阵,记为 $X_{col}$,这个操作称为 im2col:
\(
\begin{pmatrix}
x_{11} & x_{12} & x_{13} \\
x_{21} & x_{22} & x_{23} \\
x_{31} & x_{32} & x_{33}
\end{pmatrix}
\xrightarrow{\mathrm{im2col}}
\begin{pmatrix}
x_{11} & x_{12} & x_{21} & x_{22} \\
x_{12} & x_{13} & x_{22} & x_{23} \\
x_{21} & x_{22} & x_{31} & x_{32} \\
x_{22} & x_{23} & x_{32} & x_{33}
\end{pmatrix}
\)
如此一来,卷积就变为了矩阵乘:
\[ \begin{align} X \otimes W = X_{col} \, W_{col} & = \begin{pmatrix} x_{11} & x_{12} & x_{21} & x_{22} \\ x_{12} & x_{13} & x_{22} & x_{23} \\ x_{21} & x_{22} & x_{31} & x_{32} \\ x_{22} & x_{23} & x_{32} & x_{33} \end{pmatrix} \begin{pmatrix} w_{11} \\ w_{12} \\ w_{21} \\ w_{22} \end{pmatrix} \\ & = \begin{pmatrix} x_{11} w_{11} + x_{12} w_{12} + x_{21} w_{21} + x_{22} w_{22} \\ x_{12} w_{11} + x_{13} w_{12} + x_{22} w_{21} + x_{23} w_{22} \\ x_{21} w_{11} + x_{22} w_{12} + x_{31} w_{21} + x_{32} w_{22} \\ x_{22} w_{11} + x_{23} w_{12} + x_{32} w_{21} + x_{33} w_{22} \\ \end{pmatrix} = \boldsymbol{Y}_{col} \end{align} \]
这样卷积层的计算就和常规的线性回归一样了,易知:
\[ \mathrm{d} {X_{col}} = \delta \ W_{col}^T \\ \mathrm{d} {W_{col}} = X_{col} \ \delta \]
其中,$\delta$ 为上游传过来的梯度。在backward过程中,求 $\mathrm{d} W$ 只需要将 $\mathrm{d} {W_{col}}$ reshape一下即可。但是求 $\mathrm{d} X$ 就不能简单的通过reshape来进行。
我们还需要将 $\mathrm{d} {X_{col}}$ 再转回二维矩阵的形式,也就是 col2im:
转换时,同一位置的值是不断累加的。
对于多通道输入,也是一样的原理:先将每个卷积核对应的局部感受野展平为一个列向量,
然后将卷积核展平为行向量。以AlexNet为例,输入图像形状为 $227 \times 227 \times 3$,
卷积核形状为 $11 \times 11 \times 3$,步幅为4。那么就将卷积核的每个感受野展平为
$11 \times 11 \times 3=363$ 大小的列向量。以步幅4遍历整个图像后,卷积核的输出宽和高均为 $(227-11)/4+1=55$,
展平的话就是大小$55 \times 55=3025$的行向量。那么一幅图像经 im2col 后就变换成了大小 $363 \times 3025$ 的矩阵。
卷积层的权重参数也是类似的展平为列向量,AlexNet中第一个卷积层深度为96,那么经展平后,权重就变为了
$96 \times 363$ 大小的矩阵。接下来直接进行矩阵乘法就完成了forward过程,得到的输出大小为 $96 \times 3025$,对其reshape一下就得到了输出大小 $96 \times 55 \times 55$。
新的计算公式
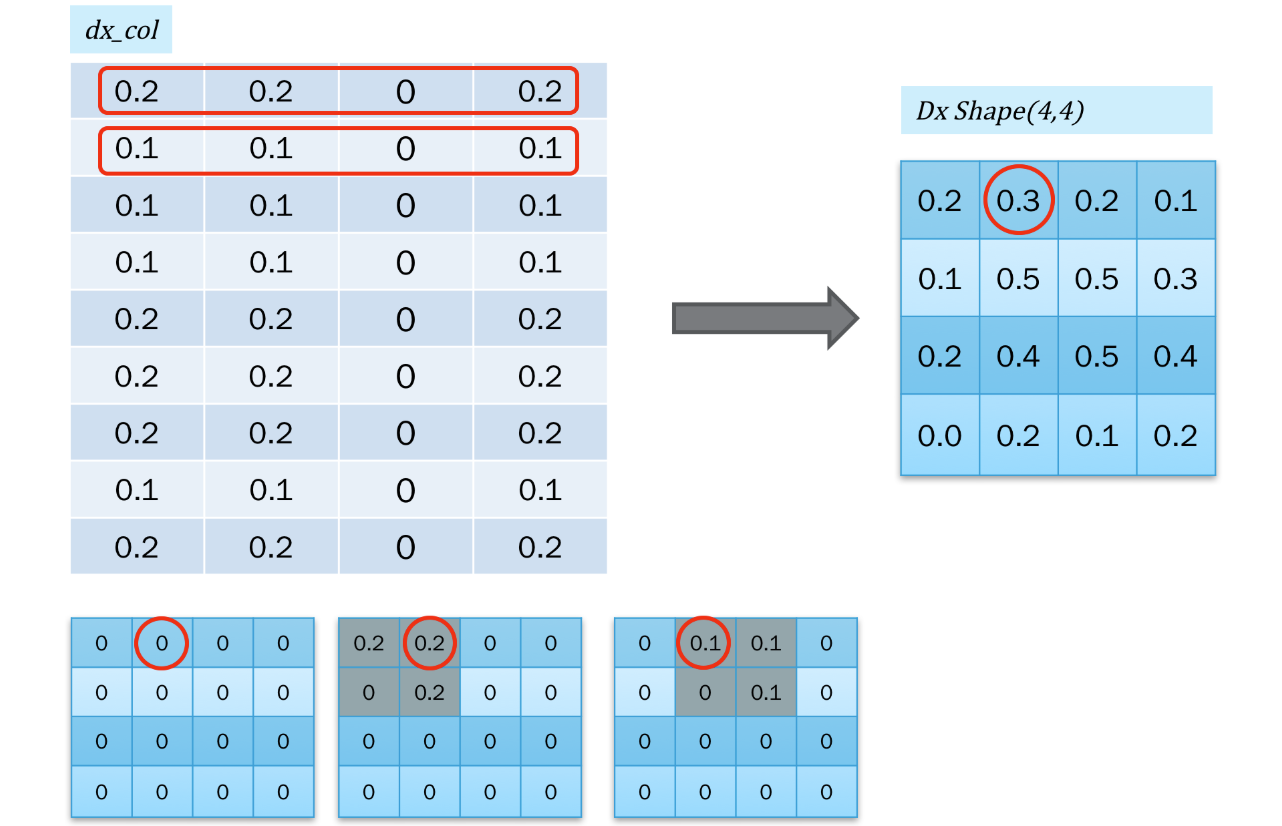
col2im 计算复杂度很高,计算 $\nabla X$ 通常还有其他的方法。
根据forward计算得到的结果 $Y_{col}$ 可以依次写出每个 $x_{ij}$ 的导数如下:
\[ \begin{split} \frac{\partial L} {\partial x_{11}} & = \boldsymbol{\delta} \cdot \begin{pmatrix} w_{11} & 0 \\ 0 & 0 \end{pmatrix} & = \delta_{11} w_{11} \\ \frac{\partial L} {\partial x_{12}} & = \boldsymbol{\delta} \cdot \begin{pmatrix} w_{12} & w_{11} \\ 0 & 0 \end{pmatrix} & = \delta_{11} w_{12} + \delta_{12} w_{11} \\ \frac{\partial L} {\partial x_{13}} & = \boldsymbol{\delta} \cdot \begin{pmatrix} 0 & w_{12} \\ 0 & 0 \end{pmatrix} & = \delta_{12} w_{12} \\ & & \vdots \\ \frac{\partial L} {\partial x_{22}} & = \boldsymbol{\delta} \cdot \begin{pmatrix} w_{22} & w_{21} \\ w_{12} & w_{11} \end{pmatrix} & = \delta_{11} w_{22} + \delta_{12} w_{21} + \delta_{21} w_{12} + \delta_{22} w_{11} \\ & & \vdots \\ \frac{\partial L} {\partial x_{33}} & = \boldsymbol{\delta} \cdot \begin{pmatrix} 0 & 0 \\ 0 & w_{22} \end{pmatrix} & = \delta_{22} w_{22} \end{split} \]
观察发现,可以用一个卷积来计算:
\[ \begin{pmatrix} 0 & 0 & 0 & 0 \\ 0 & \delta_{11} & \delta_{12} & 0 \\ 0 & \delta_{21} & \delta_{22} & 0 \\ 0 & 0 & 0 & 0 \end{pmatrix} * \begin{pmatrix} w_{22} & w_{21} \\ w_{12} & w_{11} \end{pmatrix} = \begin{pmatrix} \nabla x_{11} & \nabla x_{12} & \nabla x_{13} \\ \nabla x_{21} & \nabla x_{22} & \nabla x_{23} \\ \nabla x_{31} & \nabla x_{32} & \nabla x_{33} \end{pmatrix} \]
该卷积核为forward中卷积核翻转之后得到,这是对 $\delta$ 做卷积,称之为逆向卷积(有的地方称为去卷积(deconvolution),但用在这里并不合适,deconvolution在信号和图像处理中有明确的定义,与这里的操作不同。):
\[ \frac{\partial L} {\partial \boldsymbol{X}} = \boldsymbol{\delta} \otimes flipped(\boldsymbol{W}) \]
具体计算过程中,先对 $\delta$ 做zero-padding,然后就和forward过程一样了,通过im2col映射为 $\delta_{col}$,接着就是矩阵乘。最后将得到的 $\nabla X_{col}$ reshape 一下得到原始大小即可。
同理,$\boldsymbol{W}$ 的梯度也可以用同样的原理来计算。
Max pooling
pooling层起到下采样的作用,可以大幅度的减少网络的参数,使训练变得容易。最常用的即是max pooling。pooling层参数和卷积层相同,根据pooling的大小以及padding等参数来确定其输出的 大小,计算公式和卷积层相同。
forward时,依次处理每个pooling区域内的值,以max pooling为例,只保留pooling区域内的最大值作为输出值。若输入为 $4 \times 4$,pooling的核大小为2,stride=1,没有padding时,输出大小为 $2 \times 2$:
\[ \begin{bmatrix} 5 & 3 & 1 & 2\\ 1 & 2 & 3 & 2\\ 4 & 2 & 2 & 5\\ 3 & 6 & 1 & 1 \end{bmatrix} \Rightarrow \begin{bmatrix} 5 & 3 \\ 6 & 5 \end{bmatrix} \]
backward时,先将梯度矩阵还原为pooling前的大小,接着将梯度直接传给前一层取最大值位置处的,其他位置梯度为零,保证梯度总大小不变:
\[ \begin{bmatrix} 1 & 0 & 0 & 0\\ 0 & 0 & 0.8 & 0\\ 0 & 0 & 0 & 0.6\\ 0 & 0.4 & 0 & 0 \end{bmatrix} \Leftarrow \begin{bmatrix} 1 & 0.8 \\ 0.4 & 0.6 \end{bmatrix} \]
若是Average pooling层,backward时,则是将梯度平均分配到原来的位置上去:
\[ \begin{bmatrix} 0.25 & 0.25 & 0.2 & 0.2\\ 0.25 & 0.25 & 0.2 & 0.2\\ 0.1 & 0.1 & 0.15 & 0.15\\ 0.1 & 0.1 & 0.15 & 0.15 \end{bmatrix} \Leftarrow \begin{bmatrix} 1 & 0.8 \\ 0.4 & 0.6 \end{bmatrix} \]
原始实现代码如下:
forward:
for i in range(Hout):
for j in range(Wout):
xblock = x[:, :, i * stride:i * stride +
HH, j * stride:j * stride + WW]
out[:, :, i, j] = np.max(xblock, axis=(2, 3))Backward:
for i in range(Hout):
for j in range(Wout):
xblock = x[:, :, i * stride:i * stride +
HH, j * stride:j * stride + WW]
max_values = np.max(xblock, axis=(2, 3), keepdims=True)
mask = (xblock == max_values)
dx[:, :, i * stride:i * stride +
HH, j * stride:j * stride + WW] += dout[:, :, i, j][:, :, None, None] * maskSpatial batch normalization
BatchNorm 不仅可以加快全连接深度神经网络的训练过程,而且对CNN也有效,只不过需要略微的调整,调整后称为 Spatial batch normalization.
BatchNorm 是沿着小批量维做归一化,输入为 $\mathbb{R}^{N \times D}$,则沿着 $N$ 方向做归一化。但是在CNN中,BatchNorm的输入大小为 $\mathbb{R}^{N \times C \times H \times W}$,$N$ 为小批量实例数目,$H \times W$ 为特征图大小。
Spatial batch normalization对每个通道 $C$ 计算均值和方差,然后对数据进行归一化。 因此,将batchnorm程序稍作修改即可:
Forward:
N, C, H, W = x.shape
x_reshaped = np.transpose(x, axes=[0, 2, 3, 1]).reshape(-1, C)
out, cache = batchnorm_forward(x_reshaped, gamma, beta, bn_param)
out = np.transpose(out.reshape((N, H, W, C)), axes=[0, 3, 1, 2])backward:
N, C, H, W = dout.shape
dout_reshaped = np.transpose(dout, axes=[0, 2, 3, 1]).reshape(-1, C)
dx, dgamma, dbeta = batchnorm_backward(dout_reshaped, cache)
dx = np.transpose(dx.reshape((N, H, W, C)), axes=[0, 3, 1, 2])Group normalization
LayerNorm是BatchNorm的一种缓解batchsize依赖的选择,但研究人员发现,在CNN中,LayerNorm表现不如BatchNorm。因此又提出了一种新的归一化方法: Group normalization,为LayerNorm和BatchNorm的折衷。
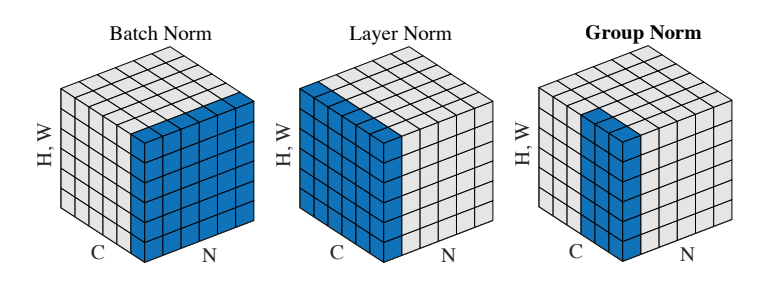
相比如LayerNorm和BatchNorm,GroupNorm多了一个控制Group的参数 G。
forward:
group_size = C // G
x_reshaped = np.transpose(x, axes=[0, 2, 3, 1]).reshape(-1, C)
gamma_reshaped = np.transpose(gamma, axes=[0, 2, 3, 1]).reshape(C,)
beta_reshaped = np.transpose(beta, axes=[0, 2, 3, 1]).reshape(C,)
for i in range(G):
index = np.arange(i * group_size, (i + 1) * group_size)
group_x = x_reshaped[:, index]
group_gamma = gamma_reshaped[index]
group_beta = beta_reshaped[index]
group_out, group_cache = layernorm_forward(
group_x, group_gamma, group_beta, gn_param)
out[:, index, :, :] = np.transpose(
group_out.reshape(N, H, W, group_size), axes=[0, 3, 1, 2])
cache.append(group_cache)backward:
N, C, H, W = dout.shape
dx = np.zeros_like(dout)
dgamma = np.zeros((1, C, 1, 1), dtype=dout.dtype)
dbeta = np.zeros((1, C, 1, 1), dtype=dout.dtype)
G = len(cache)
group_size = C // G
dout_reshaped = np.transpose(dout, axes=[0, 2, 3, 1]).reshape(-1, C)
for i in range(G):
index = np.arange(i * group_size, (i + 1) * group_size)
group_dout = dout_reshaped[:, index]
group_cache = cache[i]
group_dx, group_dgamma, group_dbeta = layernorm_backward(
group_dout, group_cache)
dx[:, index, :, :] = np.transpose(
group_dx.reshape(N, H, W, group_size), axes=[0, 3, 1, 2])
dgamma[:, index, :, :] = group_dgamma[:, :, None, None]
dbeta[:, index, :, :] = group_dbeta[:, :, None, None]总结
作业2的核心在于实现一个可用的CNN网络,重点是卷积层原理和实现以及BatchNorm层的原理和实现,作业中的卷积层采用的是原始的循环方法,是较为低效的实现,实际中一般采用 im2col 来实现,可以充分利用计算机的并行优势。而BatchNorm则是优化训练效果和速度的黑魔法,后面的LayerNorm以及GroupNorm均为其变种。